
Un nouveau drone est doté de pattes pour le train d'atterrissage, permettant des lancements efficaces
-
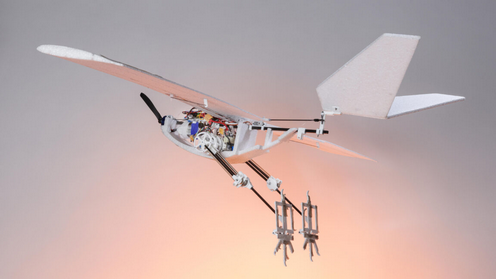
Le RAVEN marche, vole et saute par-dessus les obstacles
La plupart des drones sur le marché sont des quadricoptères à voilure tournante, qui peuvent facilement atterrir et décoller presque n’importe où. Le problème est qu’ils sont moins économes en énergie que les avions à voilure fixe, qui peuvent parcourir de plus grandes distances et rester en l’air plus longtemps mais ont besoin d’une piste, d’un lanceur dédié ou au moins d’un bon vieux lancer pour atteindre le ciel.
Pour dépasser cette limite, une équipe de chercheurs suisses de l’École Polytechnique Fédérale de Lausanne a construit un robot volant à voilure fixe appelé RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments) doté d’un train d’atterrissage bio-inspiré particulier : une paire de robots pattes en forme d’oiseau. “Le robot RAVEN peut marcher, sauter par-dessus des obstacles et effectuer un décollage sautant comme de vrais oiseaux”, explique Won Dong Shin, l’ingénieur responsable du projet.
L’efficacité du corbeau
L’équipe a calculé la vitesse de décollage nécessaire pour deux oiseaux ayant une masse corporelle de 490 grammes et un poil supérieur à 780 grammes ; celles-ci étaient respectivement de 1,85 et 3,21 mètres par seconde. Sur cette base, Shin a estimé que le robot RAVEN devrait atteindre 2,5 mètres par seconde pour décoller. En utilisant la stratégie de décollage sautant comme un oiseau, il pourrait atteindre cette vitesse en seulement 0,17 seconde.
Comment la procédure de décollage naturelle se compare-t-elle aux autres moyens d’atteindre le ciel ? D’autres options incluaient un décollage en chute libre, où vous poussez simplement votre avion d’une falaise et laissez la gravité faire son travail, ou un décollage debout, où vous positionnez l’engin verticalement et comptez sur l’hélice pour le soulever. “Lorsque j’ai conçu les expériences, je pensais que le décollage sautant serait le moins économe en énergie car il utilisait l’énergie supplémentaire de la batterie pour activer les jambes”, explique Shin. Mais il allait avoir une surprise.
« Il s’est avéré que le décollage sautant était en fait la stratégie la plus économe en énergie. Je ne m’attendais pas à ce résultat. C’était assez surprenant », dit Shin.
Le coût énergétique du décollage sautant était légèrement supérieur à celui des deux autres stratégies, mais pas de beaucoup. Il a fallu 7,9 pour cent de jus de plus qu’un décollage à l’arrêt et 6,9 pour cent de plus qu’un décollage en chute. Dans le même temps, il générait une accélération beaucoup plus élevée, ce qui vous permettait d’en avoir pour votre argent (du moins en ce qui concerne l’énergie). Dans l’ensemble, sauter avec des pattes en forme d’oiseau était 9,7 fois plus efficace qu’un décollage debout et 4,9 fois plus efficace qu’un décollage avec chute.
Pour démontrer la polyvalence de leur robot volant à pattes, l’équipe de Shin lui a soumis une série de tâches qui seraient impossibles à réaliser avec un drone standard. Leur scénario de mission de référence impliquait de parcourir un chemin avec un plafond bas, de sauter par-dessus une brèche et de sauter sur un obstacle. “En supposant une position dressée avec la queue touchant le sol, le robot pourrait marcher et rester stable même sans contrôleurs avancés”, affirme Shin. La marche a résolu le problème des déplacements sous des plafonds bas. Le saut par-dessus les interstices et les obstacles se faisait en utilisant le mécanisme utilisé pour le décollage : ressorts de torsion et actionneurs. RAVEN pouvait sauter par-dessus un espace de 11 centimètres de large et sur un obstacle de 26 centimètres de haut.
Mais Shin dit que RAVEN aura besoin de beaucoup plus de travail avant de vraiment briller. « À ce stade, le robot ne peut pas franchir tous ces obstacles d’un seul coup. Nous avons dû le reprogrammer séparément pour chacun des obstacles », explique Shin. Le problème est que le système de contrôle de RAVEN n’est pas adaptatif ; les actionneurs dans les jambes effectuent des ensembles de mouvements prédéfinis pour envoyer le robot sur une trajectoire que l’équipe a déterminée grâce à des simulations informatiques. Si quelque chose bloquait le passage, RAVEN se serait écrasé dessus.
Une autre limitation, peut-être plus frappante, est que RAVEN ne peut pas utiliser ses jambes pour atterrir. Mais c’est un sujet sur lequel Shin et ses collègues souhaitent travailler à l’avenir.
Tout cela est destiné à préparer RAVEN aux missions de recherche et de sauvetage. L’idée est que des robots volants sur pattes atteindraient rapidement les zones sinistrées, atterriraient, traverseraient des terrains difficiles à pied si nécessaire, puis décolleraient comme des oiseaux. « Une autre application consiste à livrer des colis. Ici en Suisse, je vois souvent des hélicoptères les livrer aux personnes vivant en haute montagne, ce qui me semble assez coûteux. Un drone ressemblant à un oiseau pourrait le faire plus efficacement », a suggéré Shin.
Source et plus: https://arstechnica.com/science/2024/12/robotic-bird-like-legs-let-drones-hop-over-obstacles-launch-to-the-skies/
Au final, et malgré les bonnes intentions, pas sûr que ce truc serve à mettre un rameau d’olivier dans le bec d’une colombe de la paix.
Bonjour ! Vous semblez intéressé par cette conversation, mais vous n’avez pas encore de compte.
Marre de refaire défiler les mêmes messages ? Créez un compte pour retrouver votre position, recevoir des notifications des nouvelles réponses, sauvegarder vos favoris et voter pour les messages que vous appréciez.
Grâce à votre participation, ce message peut devenir encore meilleur 💗
S'inscrire Se connecter